



通常、ジョイスティックを使用する過程で、アナログ出力信号を実現するには、ホール センサー形式とポテンショメータ形式の 2 つの方法があります。
1、この記事は、ホールセンサーの基本的な実装原理、2Dホールと3Dホールの違い、長所と短所を明確にすることを目的としています。
ホール効果の定義:
ホール効果は、1879 年に物理学者ホールによって発見されました。これは、磁場と誘導電圧の関係を定義します。 この効果は、従来の電磁誘導とはまったく異なります。

——インターネットからの画像
上の図に示すように、電流が磁場内に配置された導体 (斜線部分) を通過すると、磁場は導体内の電子に、電子の運動方向に対して垂直に力を加え、結果として電位差が生じます。導体と磁気インダクタンス線に垂直な両方向。
電流方向に垂直な磁場が半導体に印加されると、半導体内の電子と正孔はローレンツ力によって異なる方向に引き寄せられ、異なる方向に集合します。 集まった電子と正孔の間に電界が発生します。 電場力とローレンツ力が釣り合った後は、凝集しなくなります。 この場合、電場は後続の電子と正孔を電場力の対象にし、磁場によって生成されたローレンツ力と釣り合い、後続の電子と正孔がずれることなくスムーズに通過できるようにします。これがホール効果です。 . 両側の電圧差はホール電圧と呼ばれます。

回路図
電子は磁場に電位差を生じさせ、ローレンツ力を発生させます
ローレンツ力 F=qE プラス qvB/c
だからホールフィールド
UH=RH·I= -B·I /(q·n·c)
ホール効果の適用:
ホール効果は以前に発見されましたが、定数磁石と電子部品の開発によって制限されました。 ホール センサーは 1970 年代頃に初めて登場しました。
基本ホールセンサは、シリコン単結晶材料の回路チップを気密パッケージ構造にパッケージングすることにより、信頼性の高いホールチップ集積回路として設計されています。
ただし、回路設計上の問題により、初めて使用されるホール チップは温度ドリフトによる大きな電圧変化を生じ、実際の産業環境では適用できません。
その後、1990 年代頃まで、MLX などの一部の企業は、温度補償回路を使用して、磁場計算式の温度関連パラメータの影響を相殺し、磁場が温度によって変化しないようにしました。 さらに、ホールチップは、ホールチップによって設定されたアナログ出力を使用要件に適合させる必要のないプログラム可能な操作を実現し、ホールチップの使用シナリオと範囲を大幅に広げます。
ホール チップは産業および車両環境で広く使用され始め、変位と回転角度のパラメータを判断し、それらをアナログ出力に変換するために使用されます。
MLX社に続いて、国内外の多くのICメーカーがホールチップの開発に参加しました。 現在使用されている従来のホールチップは、通常冗長判定用の複数のホールチップを重ね合わせたもので、アナログ出力の分解能と精度を大幅に向上させています。
ハンドルのホールの使用:
初期の産業用ハンドルは、弾丸を押して油圧バルブを駆動するハンドルの回転構造を通じてアナログ出力を実現していました。 インテリジェントな制御とロジック設計に欠陥があり、油圧装置には必然的に油漏れ現象が発生し、汚染レベルの要件が高いシーンやクリーンな環境が必要なシーンでは使用できません。

弾丸形の油圧使用
——インターネットからの画像
ホールは、ドイツのメーカーであるダンフォスによってジョイスティックで最初に使用されました。 その主な製品は、JS1、JS1000 などです。
MLX、TI、McGahnなどのホールチップメーカーがハンドルに一般的に使用されています。
2D 平面ホールと 3D ホールには、使用方法の違いによる違いがあります。
2D ホールと 3D ホールの違い:
通常、ハンドルのホールの使い方は、回転と変位とスイングに分けられます。 回転式は2Dホール、変位・スイング式は3Dホールです。
* 磁性鋼の使用に注意してください:
ホールの形態に関係なく、ホールの動作の安定性を達成するために 2 つの重要な制御要件があります。
1つ目は、磁性鋼とホール中心の間の距離で、ホールチップのモデルによって異なります。 一般的には1~5mm程度です。
2 つ目は、磁性鋼の磁化サイズです。ホール チップ モデルによると、通常は数十 mT から数百 mT です。
2 つのパラメータのいずれかが範囲外または偏差が大きい場合、ホール チップが不安定になり、出力の変動または出力の偏差が発生します。
また、一般的に電磁鋼は長期使用による減磁による出力変動がなく、そのキーパラメータは電磁鋼の保磁力です。 保磁力とは、磁性体の飽和磁化後に外部磁場がゼロに戻ったときに、磁気誘導強度Bがゼロに戻らないことを指します。 元の磁化方向とは反対方向に一定の大きさの磁界を加えることによってのみ、磁気誘導の強さをゼロに戻すことができ、これを保磁力または保磁力と呼びます。
一般に、磁性鋼の保磁力には、850KA/m 以上の Hcb が必要です。 固有保磁力 Hcj 955KA/m以上。 主な影響要因は、磁性鋼の材質です。 一般に、フェライト材料の保磁力は小さく、長期間にわたって電磁鋼の減磁につながります。 また、NdFeb 材料の保磁力はより大きく、通常、使用条件下での非長期高温 (60 ~ 80 度以上) では、約 5 ~ 10 年の使用で十分です。
ハンドルに使用される磁性鋼は、通常 N35 Ndfeb 磁性鋼です。
磁性鋼のその他の制御要素は、残留磁気 Br と最大磁気エネルギー積 BH(max) です。
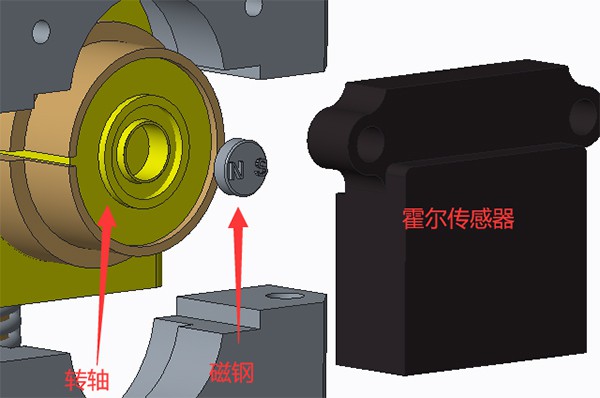
1.ロータリータイプ:
ロータリーホールは通常、回転軸の中心に設置され、磁化方向は放射状です。 ハンドルシャフトを回すと、ホールセンサーを通る磁束の変化によりホール電圧が発生します。
この使用方法の利点は次のとおりです。
1. 電圧の対称性が良好です。
2.実現難易度が低い。
3. 両軸ハンドルの場合、XY軸の干渉が少ない。
4. 単軸ハンドルで省スペース。
5.着磁難易度が低い。
6.回転角度は大きくてもかまいません(360度未満)
欠点は次のとおりです。
1. 2 軸ハンドルを実現すると、比較的大きなスペースを占有する必要があります。
2. 必ず回転中心でご使用ください。
回転の種類
1.変位式:
通常、変位の使用は、最初のフラグ MT1531 チップなどの 3D ホールの使用でもあります。 通常、磁化の方向は放射状です。 このように、磁場鋼は、中間点で0 mTの磁束を持つ必要があります。これは両側で最大です。 このように電磁鋼を着磁する場合、帯状電磁鋼や曲面電磁鋼の両面の着磁均一性が要求されます。 磁石のサイズが違うと磁束分布が不均一になり、ハンドルを振ったときの出力が左右で直線的にずれます。
利点:
1.構造が簡単で、変位ホールの価格が低い。
2.回転の中心に配置するのが難しい磁性鋼の構造相が優れています。
3. 適用範囲が広い構造は、構造のより多くの変化をすることができます。
短所:
1.磁性鋼には磁化対称性が必要です。
2. 一般に、変位公式の線形対称性を実現することは非常に困難です。
3. 回転角度が大きすぎないようにしてください。 (通常40度を超えない)

——MLX90333仕様の画像
1.スイングタイプ:
振動ホールは、二軸ホールの一般的な実現です。 ホールセンサに複数のホールチップを重ねることで、1チップで2軸、さらには多軸出力を実現。
通常、磁性鋼の磁化の方向は軸方向の磁化であり、円形の磁性鋼の軸方向の磁化は磁化の難しさを大幅に軽減します。

——MLX90333仕様の画像
ホール センサーの場合、単一の 3D チップは 2D チップよりも高価ですが、2 軸出力を実装するコストは 2 つの 2D チップを使用するよりも比較的低くなります。
利点:
1. 磁性鋼は着磁難易度が低い。 組み立ての難易度が低い。
2. 二軸実現コストが低い。
3.ハンドルの水平スペースは占有されていません。
短所:
1.ホールパッチのオフセット要件は比較的高く、SMTのオフセット要件は一般に溶接足の1/2以下です。 そうしないと、大きな 2 軸干渉が発生します (つまり、1 つの軸を押すと、もう 1 つの軸に出力変動があり、3D ホールは 2 軸干渉を回避できませんが、一般的に出力偏差範囲内が適格と見なされます)。
2. 一軸出力を実現するためのコストが高くなります。
3. 回転角度が変位タイプよりも小さい (通常は 30 度以下)。
Shanghai Chen Gong Electric Control の HJ8 ハンドルは、MLX90333 の 3D ホールを使用しています。
イイ。 ホール出力偏差に影響を与える要因:
一般的に、ホール出力電圧に影響を与える要因は主に以下の理由です。 一般に、チップが故障することはほとんどないため、出力電圧の偏差の原因は主に磁束の変化から分析されます。
1.磁性鋼による磁束変化:
磁性鋼は、次のようなさまざまな理由により磁束を変化させ、出力電圧を変化させます。
A. 保護が不十分な場合、磁性鋼に鉄粉が吸着し、磁束が変化します。
B. 磁性鋼の不適切な固定は、磁性鋼の緩みにつながります。
C. 磁性鋼をリベットで留めたり固定したりすると、隠れた亀裂が存在し、高温および低温後に亀裂や磁束の変化につながる可能性があります。
回避する方法:
これらの要因を分析し、設計とプロセスの FEMA で改善策を追跡する必要があります。
2.外的要因による磁束変化:
一般にホールチップを通る磁束は、外部磁界や電圧の影響による回路変動により変化し、出力に影響を与えます。
回避する方法:
EMC試験を実施し、シールドシールドを使用してホールチップのシールドを強化しました。
3.機械構造による出力偏差:
長期使用によるメカニカルクリアランスの増加は、出力偏差の増加につながります。
回避する方法:
構造設計を最適化します。
4.外部入力電圧非安定化電源:
一般的に、ホール ハンドル メーカーの公称ホール入力電圧は 5.0Vdc±0.5V ですが、実際には、この電圧はホール センサーを駆動する電圧を指します。 キャリブレーション出力電圧値が 0.5~2.5V~4.5V 出力、入力 5.5V 電圧の場合、出力電圧の中央値は 2.75V になり、要件の中央値の範囲を超えます。 したがって、顧客は通常、安定化された電源を使用するように言われます。 電源偏差は通常、±0.1V の最適な範囲の条件で ±0.2V です。